I moved the whole logistic network/chest extensions to viewtopic.php?f=80&t=43460 Logistic Network and Logistic Chest Extensions
These suggestions are a little bit "mixed up", cause there is not really a clear line between roboports, roboport-area, logistic-network (and -area) and the robots in that both areas. I'm sorry for that, but it is a game-mechanic, which is very entangled (and it is good so).
First some explanations:
- There is a logistic network, a logistic area, a construction network and a construction area. Logistic bots can work only in a logistic area, construction bots can work only in the construction area.
- All connected roboports built a (logistic or consruction)-network.
Provide and catch back robots into and from a logistic network:
- With v0.12 you can place an inserter to fill in bots into a roboport. Use the robot-combinator-mod (see below), to find out, how many are really needed.
- With v0.12 you also grab bots out of a roboport with an inserter.
- With v0.12 you are not able to order some number of bots to roboports to take the robots out of the network.
- With v0.13 we will be able to connect the circuit network to the logistic network and get robot-count and other info from there. See FFF #123.
(Suggestion: Enable the player to order robots to a roboport, like a requester chest. That enables you to take them slowly out of the network. Same seems to be simple for repair packs. In the end it is nearly the same game mechanics as in Siedler II, where you order knights, swords etc. into towers.)
General suggestions about roboports (mixup)
viewtopic.php?f=6&t=1633 Logistic bot control tower [Very old, still interesting]
viewtopic.php?f=6&t=3202 Some ideas to change Bots mechanic
(and answer: viewtopic.php?f=6&t=3202&hilit=roboport+charge#p23536 - see also down to Robocharge-mod)
viewtopic.php?f=6&t=3551 Custom UI notifications from logistic network conditions
viewtopic.php?f=6&t=4605 logistic questions
viewtopic.php?f=6&t=5348 Bigger, smaller roboports and interstation
viewtopic.php?f=68&t=5748 reassign pending construction robots with cargo
viewtopic.php?f=6&t=6981 Ordering docked bots
viewtopic.php?f=6&t=7993 Splitting up roboport functions
viewtopic.php?f=6&t=8214 "Logistic network"-independent robot recharging
viewtopic.php?f=6&t=13457 Multiple Roboport/Blueprint suggestions
viewtopic.php?f=6&t=14568 Modules for the Roboport
viewtopic.php?f=6&t=25365 Two robo suggestions! [change logistic area size]
viewtopic.php?f=6&t=28985 Allow roboports to snap to logistics net when holding shift
viewtopic.php?f=6&t=34171 filter for roboport content
viewtopic.php?f=6&t=35401 Roboport ideas
viewtopic.php?f=6&t=35516 Multi-purpose (smart) logistic chest
viewtopic.php?f=6&t=37484 Builder Bots
Handling of the Number of Bots in a Network
viewtopic.php?f=6&t=4723 Power and the robots
viewtopic.php?f=6&t=4996 Smarter Robot charging
viewtopic.php?f=6&t=3850 Roboports may request bots
viewtopic.php?f=6&t=5749 Logistic bot network usage statistics [See robotic combinator mod below]
viewtopic.php?f=6&t=8925 Distribution of robots
viewtopic.php?f=6&t=10152 Controlling robot distribution
viewtopic.php?f=6&t=14083 Robot Dropoff
viewtopic.php?f=6&t=18996 Add support for adding and removing robots from network
viewtopic.php?f=6&t=28176 Control Number of Bots in Roboport/RP Content To Circuts
viewtopic.php?f=6&t=41099 Roboport Robot filter
viewtopic.php?f=66&t=45318 Filter in roboports
viewtopic.php?f=6&t=47144 Add auto lauch and request robots ability to roboport
Handling of Robot-Routing / Pathing / Charging
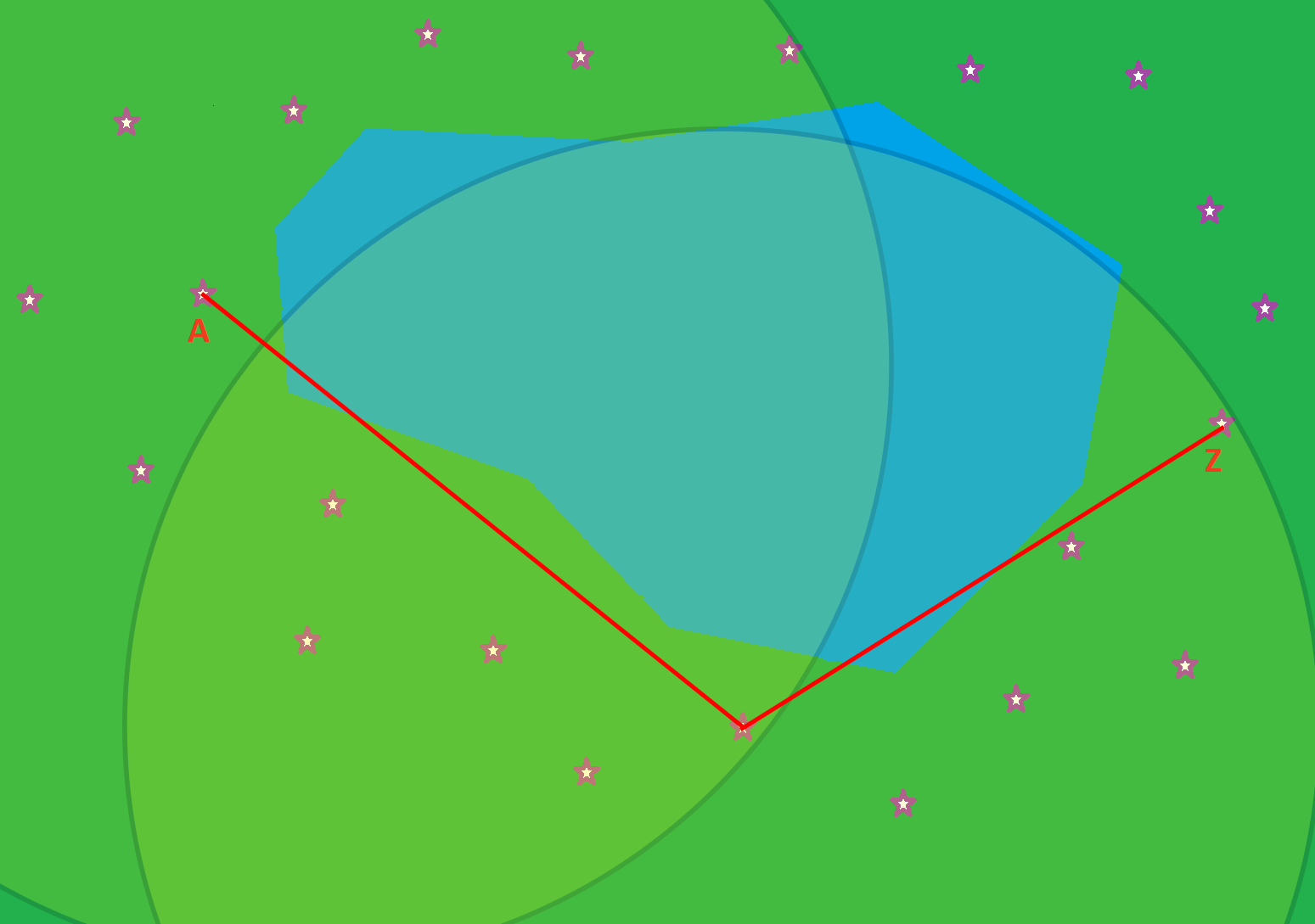
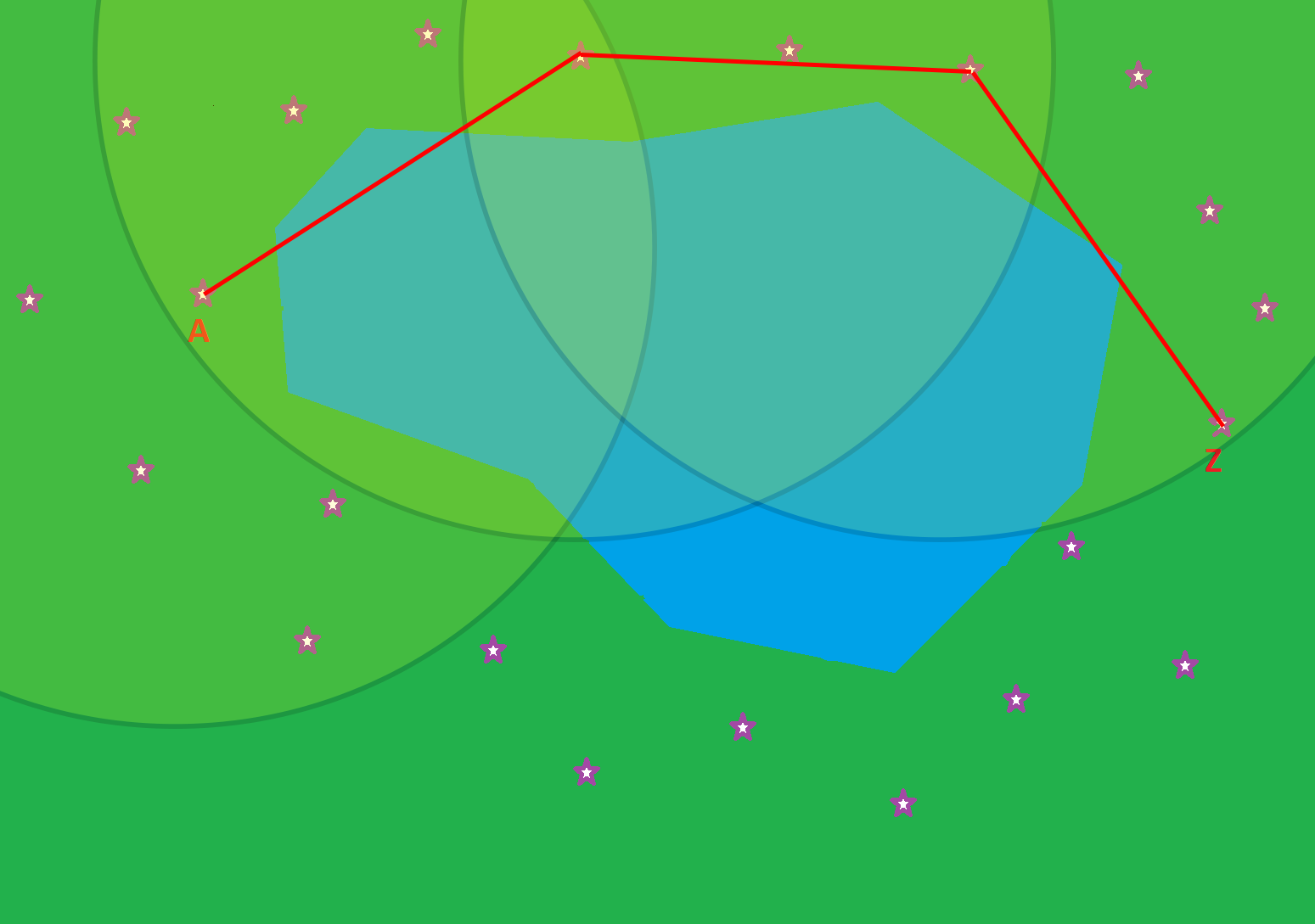
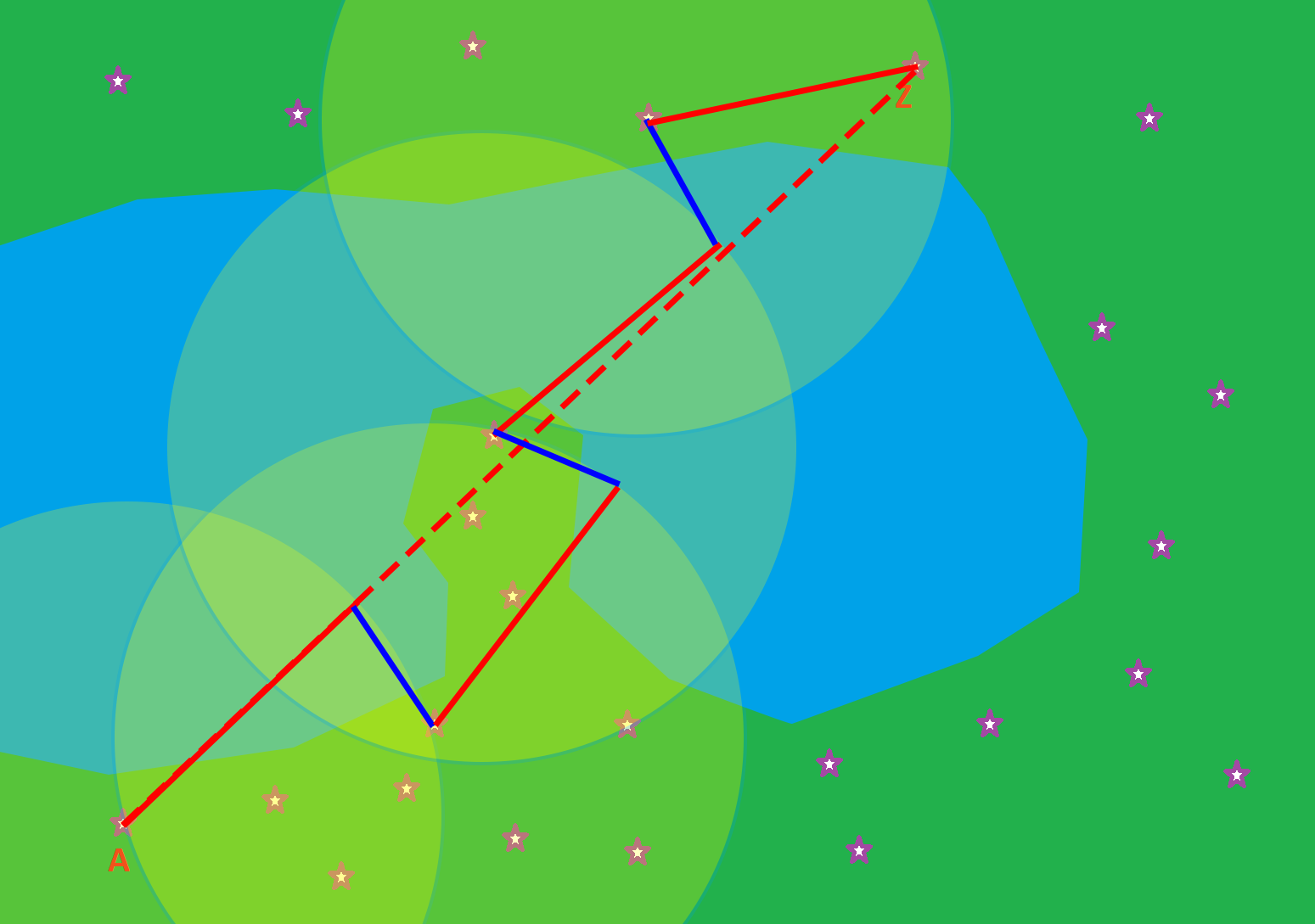
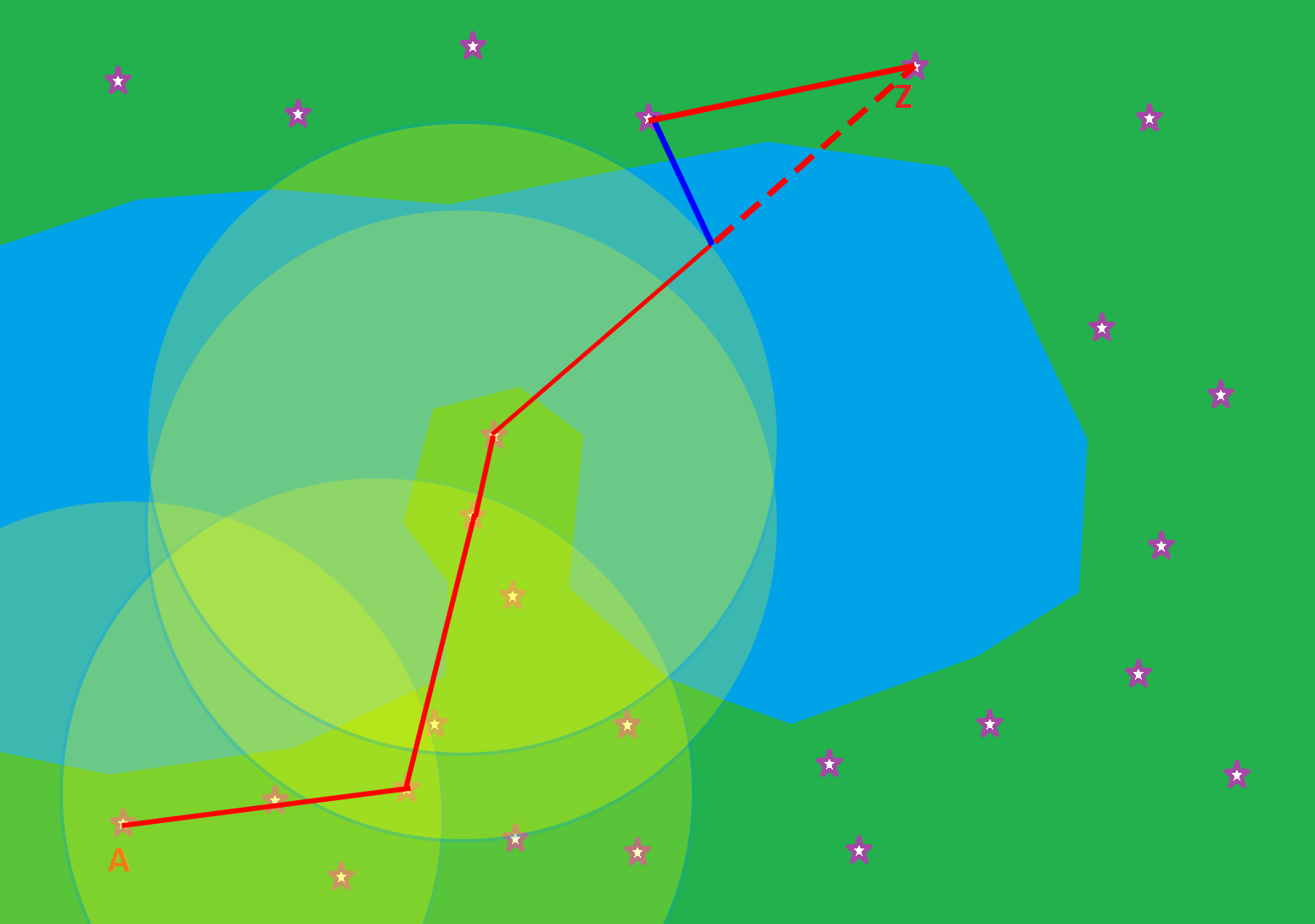
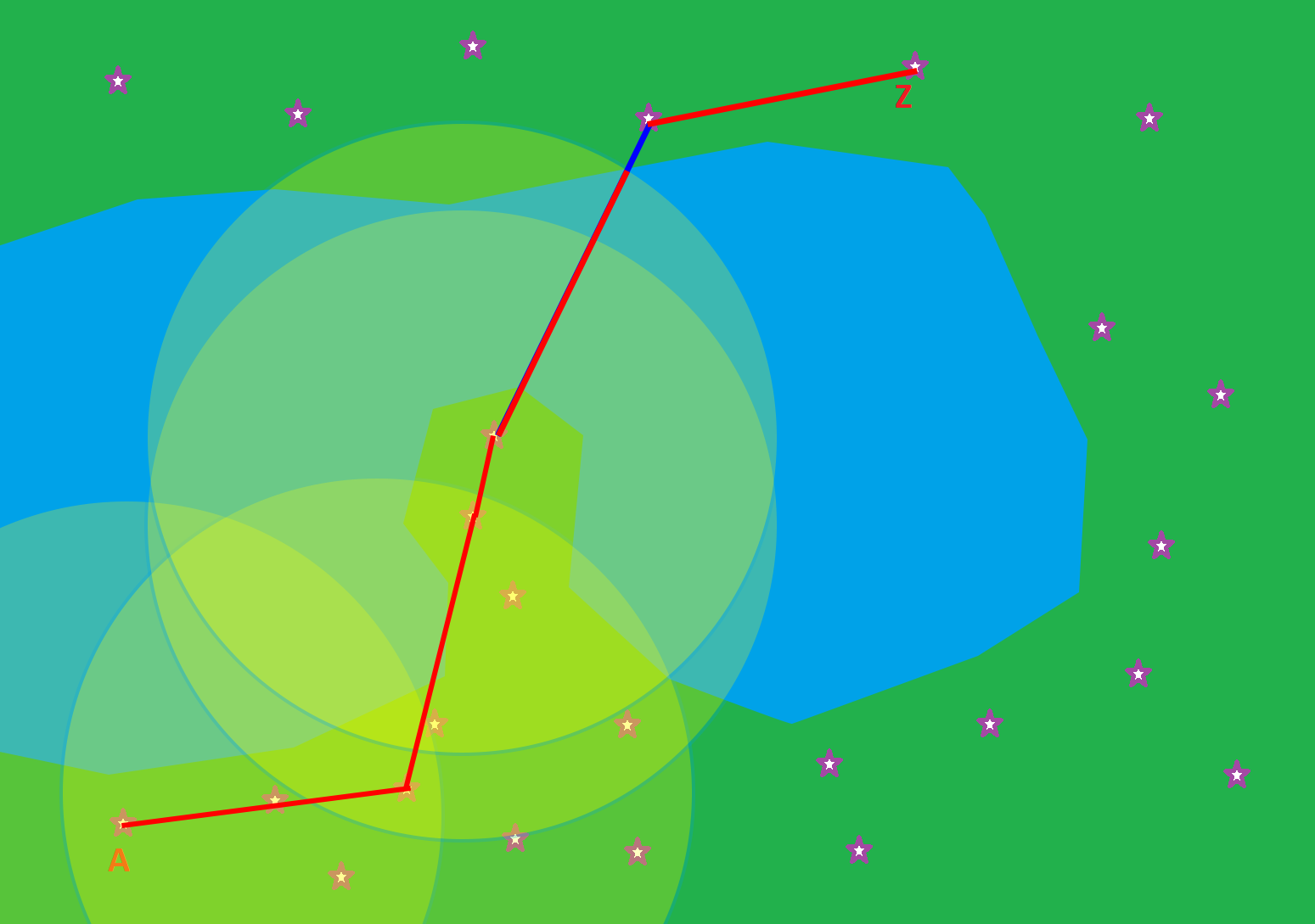
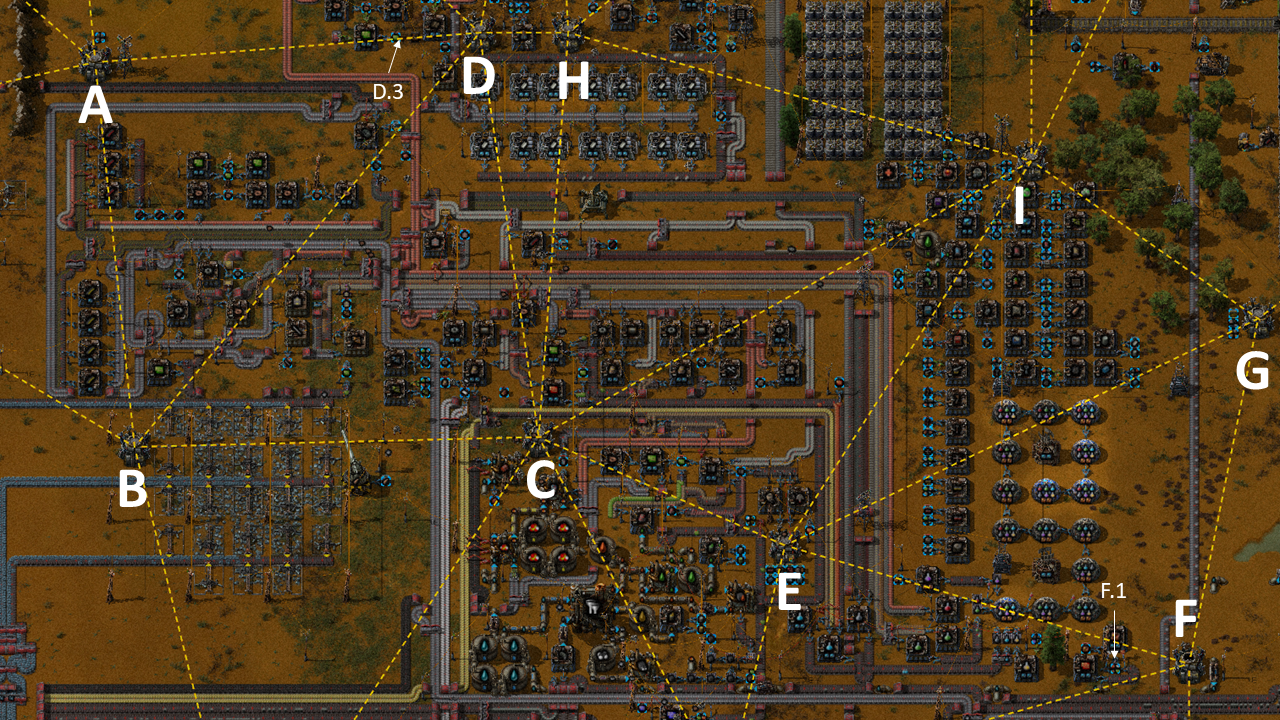
This sub-topic is about problems, when the robot-area is not in a circle shape, but hase more the shape of an "U", well described with this pics.
The general opinion of this forum is currently, that there is not much, that could be improved here by more intelligent routing, cause that means, that the robots need to take a lot more CPU cycles, to calculate that path. Current behavior looks non-optimal, but is not that bad, as it looks (only for the case of U-shaped base, but that should just be avoided or you live with the problems they create.
- 36vs1x.png (12.39 KiB) Viewed 28904 times
- 4aiuom.png (20.67 KiB) Viewed 28904 times
- technjshv.png (6.65 KiB) Viewed 28904 times
viewtopic.php?f=6&t=12859 Bot Exclusion Zones
viewtopic.php?f=6&t=18082 Let all bots use the personal roboport to charge.
viewtopic.php?f=6&t=23021 Node based pathing for bots
viewtopic.php?f=6&t=21781 Stack size bonus for construction robots
viewtopic.php?f=6&t=26702 Logistics bots should cancel job when request is canceled
viewtopic.php?f=6&t=28325 Roboport option to output construction needs
viewtopic.php?f=6&t=28614 Bot pathing for big bases
viewtopic.php?f=6&t=37761 Roboport waypoint setting
viewtopic.php?f=6&t=38036 Make all bots stay inside their network
viewtopic.php?f=6&t=41361 Construction chests
viewtopic.php?f=6&t=41428 Optimize Drone Movement [explains, why this is not such a good idea]
viewtopic.php?f=6&t=42214 Droids Pathfinding
viewtopic.php?f=6&t=48183 Worker Robots Pathfinding Update (!Important)
An interesting statement from a dev:
viewtopic.php?f=11&t=15234&p=103165&hil ... rt#p103529
Other
The Right Pane / Logistic Info
This will be changed in V 0.15. See FFF #180.
viewtopic.php?f=80&t=17779 Detach Logistic Item Listing From Right Pane [Link Collection Thread]
( viewtopic.php?f=6&t=2583 Logistic network, Storage Infoscreen
viewtopic.php?f=6&t=1222 Logistic overview on the right side
viewtopic.php?f=6&t=4706 Logistics Statistics Screen
viewtopic.php?f=6&t=9957 Logistic System Informational Window
viewtopic.php?f=6&t=13393 Interface For Logistics Storage )
Blueprinting
viewtopic.php?f=6&t=3768 Prioritize Ghost buildings and blueprint construction
viewtopic.php?f=6&t=3868 Player logistic slot improvements
viewtopic.php?f=6&t=22711 Use of a key combination to force personal or base robots to build / deconstruct.
Balancing
viewtopic.php?f=16&t=15109 Build time 0.5s for Logistics/Construction Robots
Defaults for Requesting Items
viewtopic.php?f=67&t=9069 Requester chests should default to zero or one
viewtopic.php?f=6&t=26731 Initial amount of items delivered by logistic system
Mods:
viewtopic.php?f=120&t=14650 Robocharge - Robot Charging Station
viewtopic.php?f=92&t=14388 Advanced Logistics System 0.2.10
Related Logistic Suggestions
I moved the whole logistic network/chest extensions to viewtopic.php?f=80&t=43460 Logistic Network and Logistic Chest Extensions
Other related collections
viewtopic.php?f=6&t=2563 Trains as linkers between seperated logistic networks
viewtopic.php?f=80&t=15326 Stack Filters for Chest, Vehicles and others
viewtopic.php?f=80&t=19987 More Game Information (Statistics, Monitoring, Graphs)
viewtopic.php?f=80&t=18093 Roboport/Logistic Network/Robot Enhancements/Robot Routing/Charging