Meanwhile they need to return to Drone-Ports very often.
Drone-Movement can be improved as described bellow:
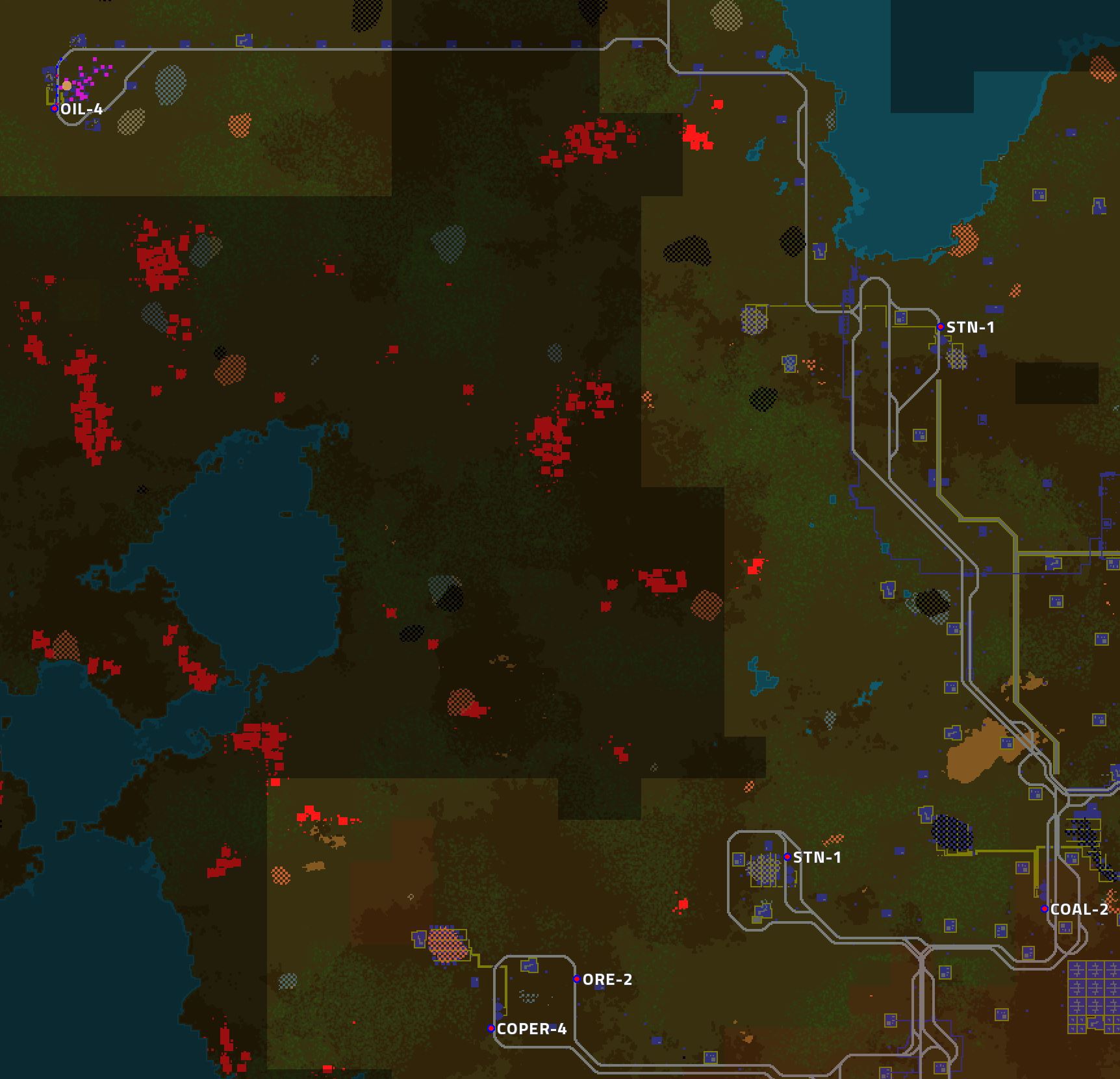
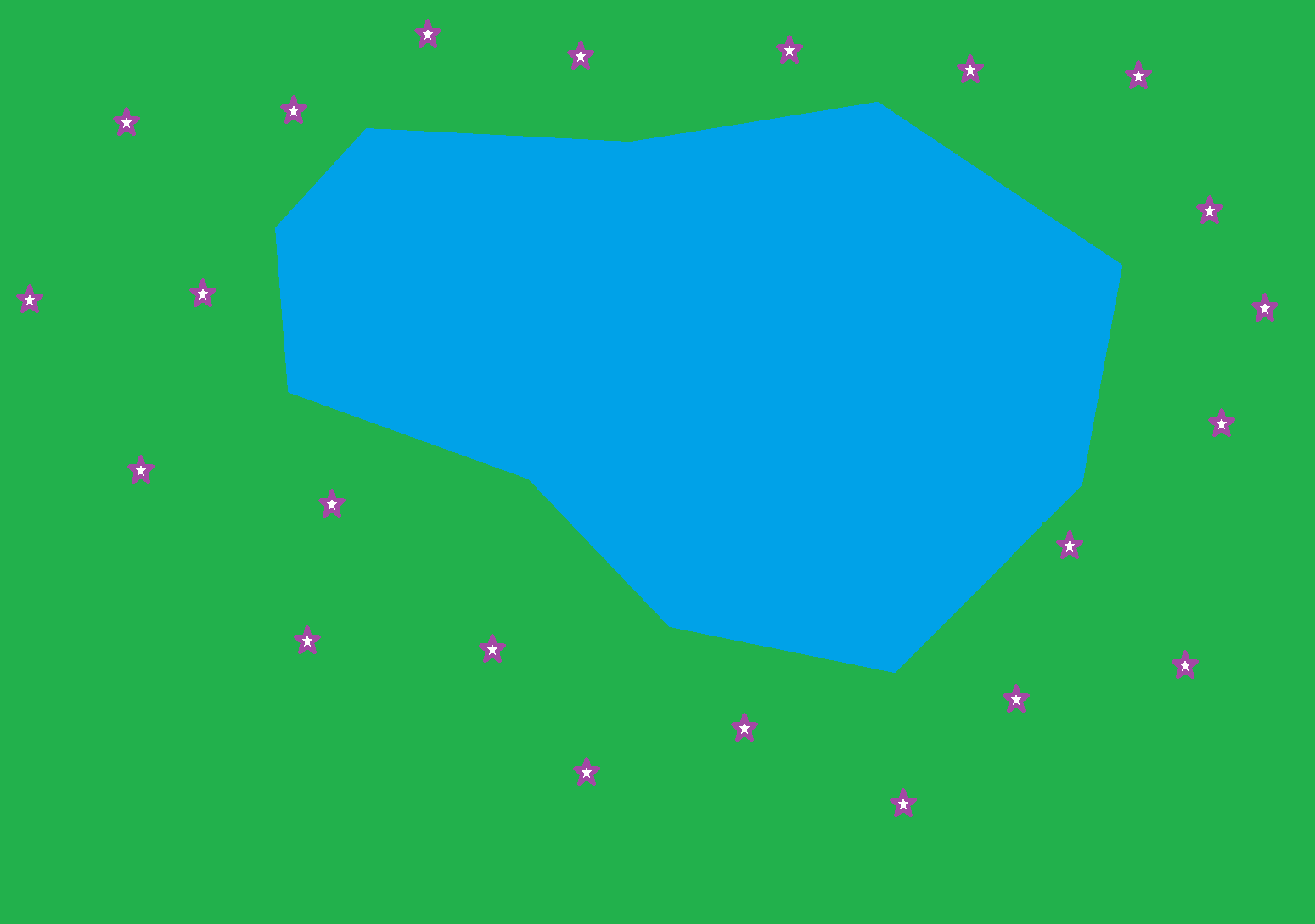
1.) Consider a Base build around a big Lake:
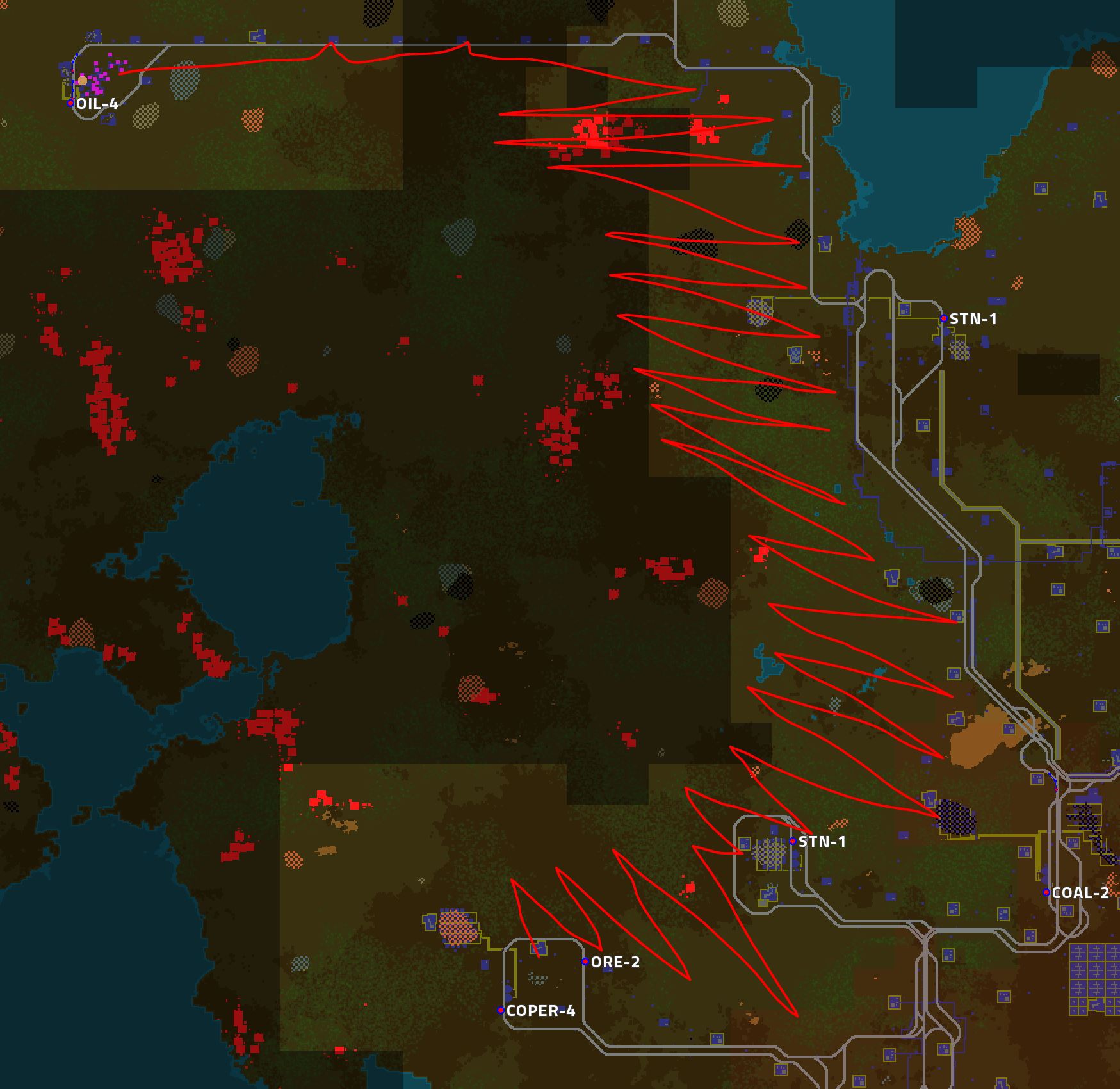
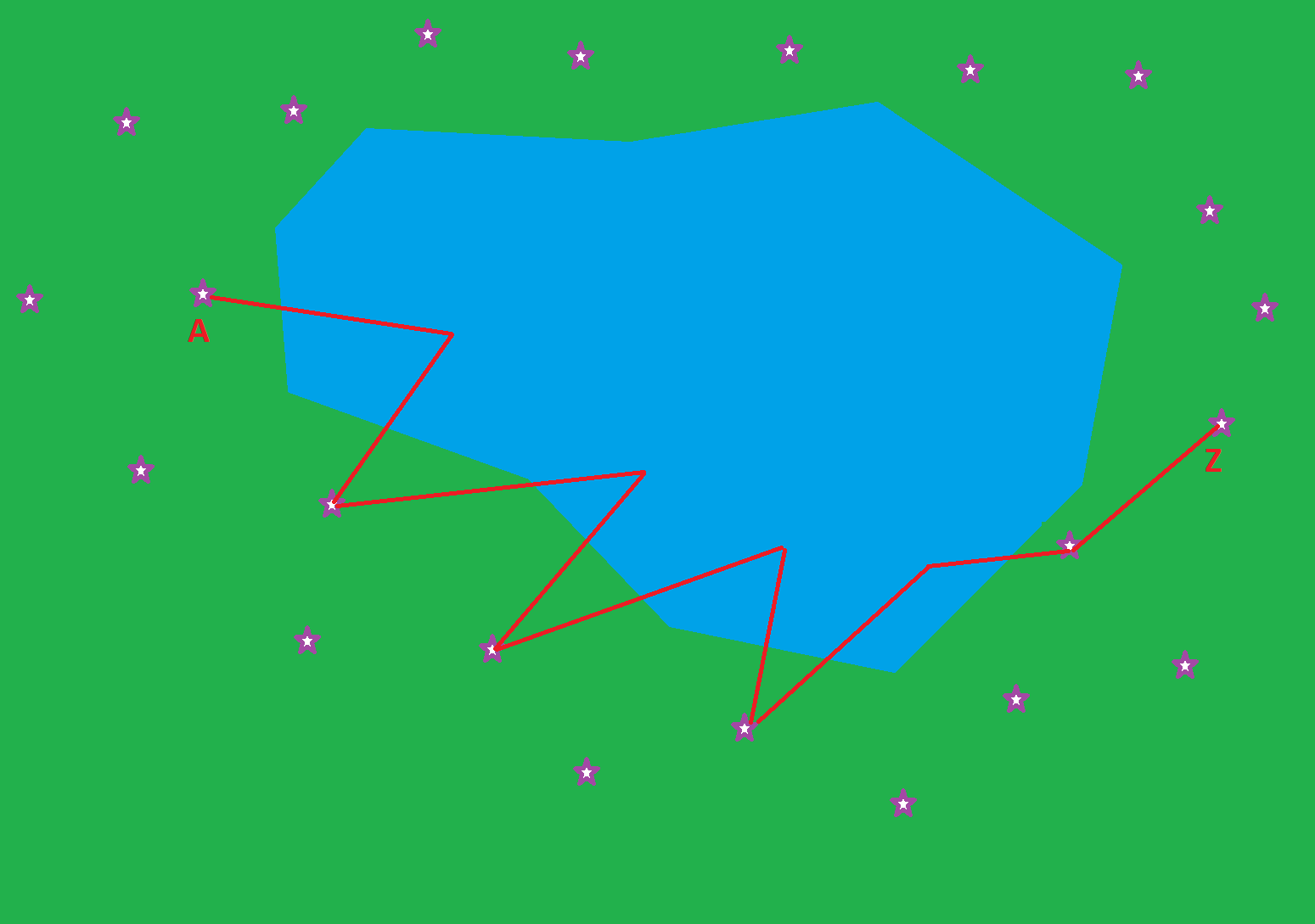
2.) Having a Drone which should deliver Goods from A to Z

3.) Currently this results in a behaviour like the following example shows:
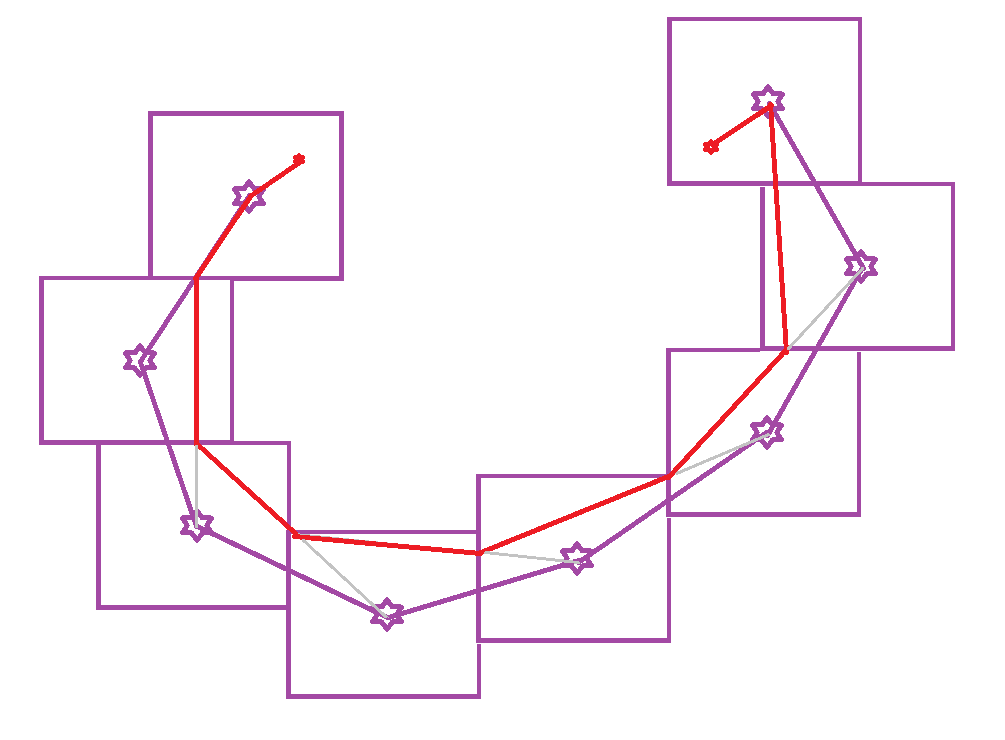
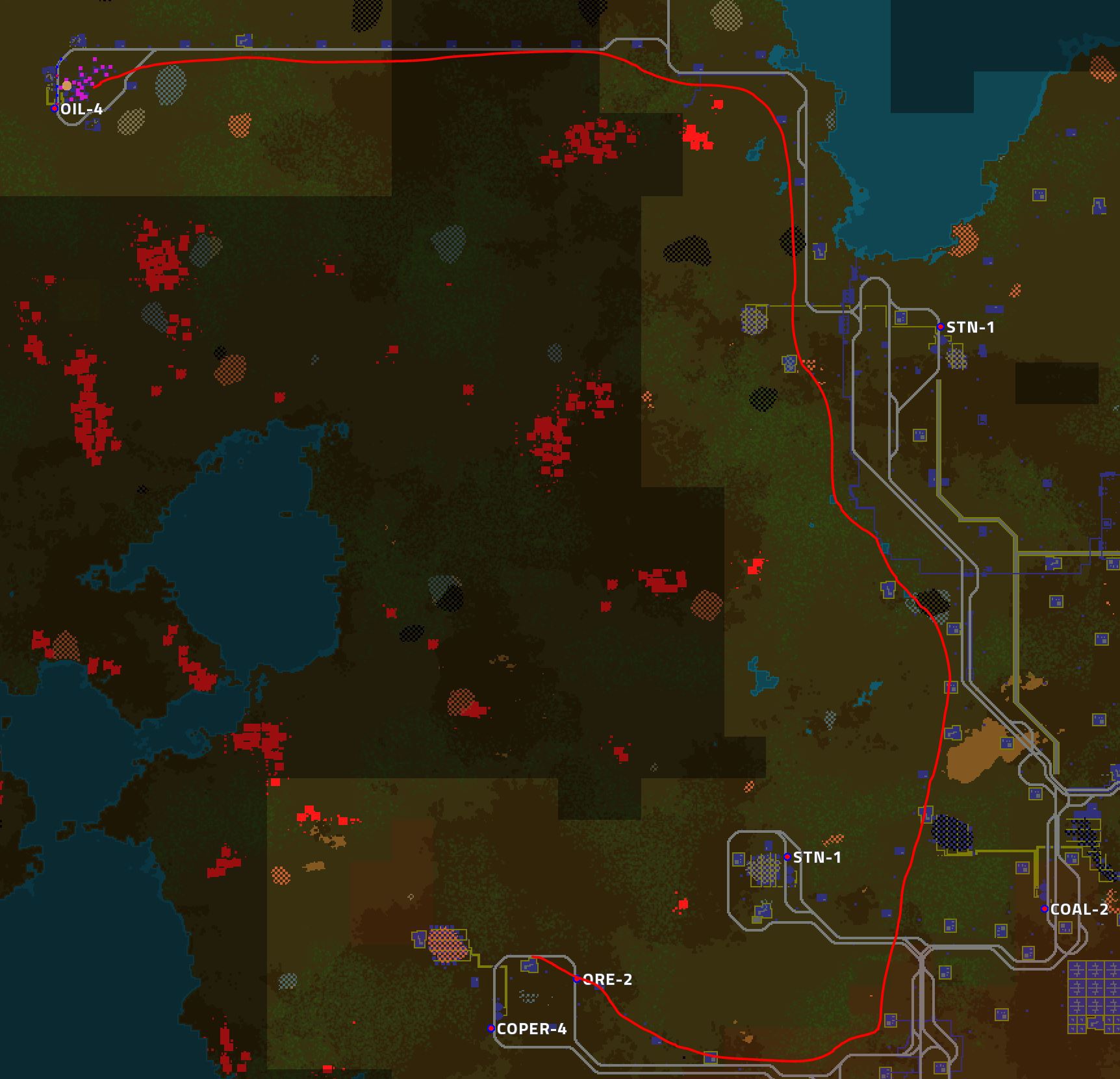
4.) Rather than that: The Drone-Port-Connections should be utilized. The drone should start "moving" and as soon as it hits the Drone-Port-Area, it should change its direction right to the "center" of the NEXT drone-port area.
- A Drone from "Zone A" which should be deliver a good to "Zone Z" should first use a path-finding algorithm to detect the shortest way, based on drone-port-connections. (purple: Drone Port connections)
- gray: "Next" path, based on targeting the center of the next drone port area (the drone port itself).
- red: Actual path by changing direction as soon as the border of any drone port area has been hit.
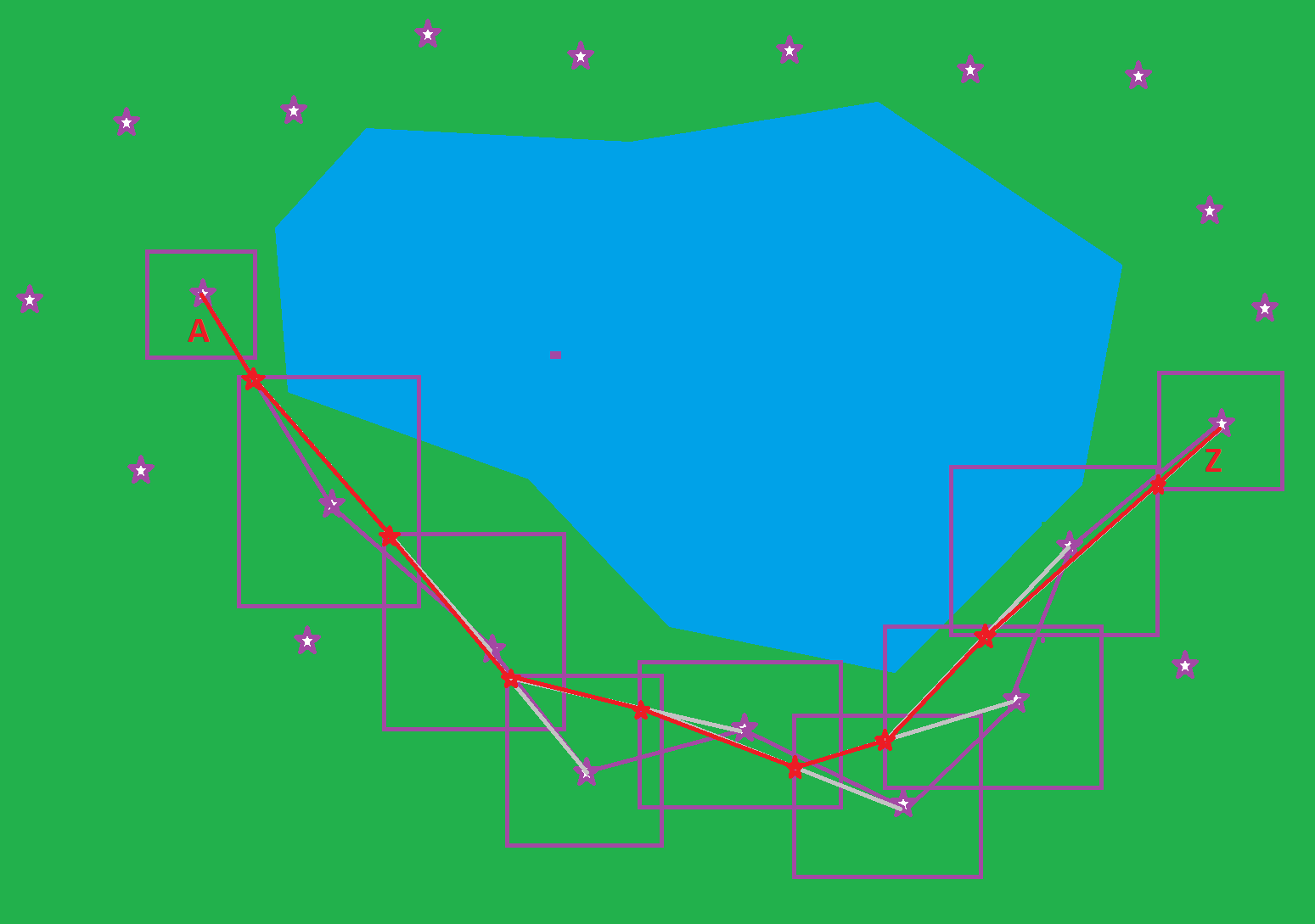
This would ensure that drones are staying within range for recharge, but more important: Avoiding "dumb" movements in case of lakes and/or U-shapped bases...