
There's a few suggestions here, I hope they make sense!
Robot Charging
At the moment there are 4 charging points to a Roboport but these often seem to get crowded and 'jammed' in a number of circumstances;
- Placing large blueprints
- Deconstructing many objects
- Robots travelling large distances
This issue can somewhat be alleviated by placing multiple Roboports within range of the pathing of the robots, however that can often get both messy and consume quite a lot of space. My suggestion is to have a specialized robot charging tower/building. I can see two possible ways in which these could work;
- A 'deck' where robots can land and charge (same mechanic as the current charging on Roboport but with an increased number of charging slots available)
- A charging tower - this could work differently to how the current charging mechanic works where robots have to wait for a free charging slot, instead this tower could generate an electric field/arc that if robots pass through they receive charge.
I know there are a couple of mods out there that offer robot charging poles however I feel that the vanilla game would really benefit with one of these mentioned ideas.
No-fly zones
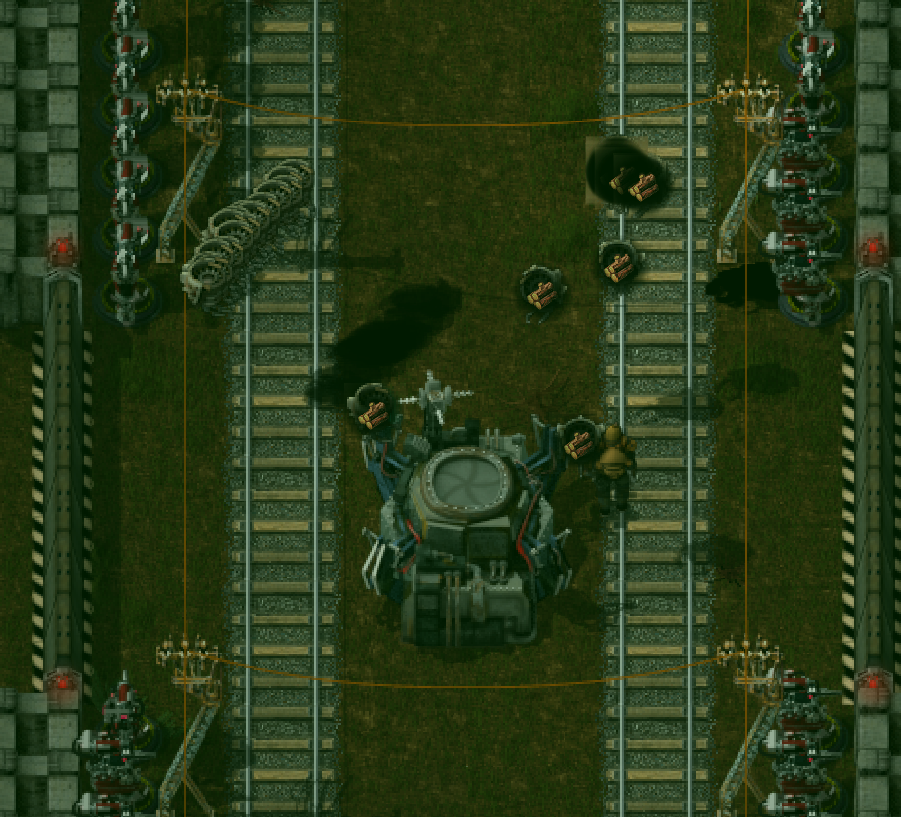
This is an issue that I constantly seem to have when attempting to create my long distance rail network (I use robots to lay the track and surrounding turret defense). The issue can best be described by the following picture:

As can be seen here the robots are free to fly between the Roboports indicated by the arrow and can path over the biter nest (outside of the construction zone) - whilst this is often helpful to the player and reduces the flight time in many situations it can be a real problem when there are biter bases in between. This could be solved by creating multiple networks - however that can get messy and rather tedious (especially when you want to construct things and want to have items available in the logistics network). A suggested solution to this issue revolves around increased control of Roboports and robot mechanics which could be set by the player. I see this working one of two ways;
- Player assigned no-fly zones (could be assigned in a similar way in which blueprints work). However this could potentially get rather messy when assigning multiple no-fly zones and could potentially force robots to go 'around' the no fly zone on an unintended side.
- Increased player control of Roboport/robot behavior - allow the player to set robots within a roboport network to only travel within the construction zone. This solution seems quite simple and piggybacks off the current zones allocated to Roboports. This could be controlled through the 'Roboport controller' (see below).
'Call robots'
This is a simple (yet I think often useful) tool that would allow the player to easily control how many robots are within a network or to have maximum robots nearest to where a blueprint/deconstruction is going to take place. This would be extremely useful in robotic networks covering large distances as sometimes (if enough blueprint/deconstruction takes place) it can take ages for robots that are far away to get to the area in which the task has been allocated. Again this could be controlled through the 'Roboport controller'
Roboport controller
This building could be placed either directly adjacent to a Roboport or could work wireless if within the construction zone of a robotic network. The whole idea of such building is to increase the control of robot behaviors to the player. It would serve as the interface between the player and the robotic network in setting/adjusting some of the previously mentioned ideas as well as many other potential settings. This could also allow the player to automate the addition (and control the number of) robots into a network by having an internal storage that could be filled with robots.
Robot battery research
As with the current research upgrades that increase carry capacity and speed I suggest a battery upgrade that could increase battery capacity by 10/20/30%. This would allow for longer flight without the need to charge and may help to alleviate the 'jamming' as described above.
Selective deconstruction blueprints
This one is rather simple but something I have wanted for ages - the ability to remove a select item/building using a deconstruction blueprint. This is particularly helpful when upgrading logistics or power infrastructure (small poles -> medium poles, slower belts -> faster belts etc.).
Blueprint Book
The issue of having to carry multiple blueprints becomes rather prevalent especially in the late game and/or in massive worlds. This could be alleviated with the implementation of a blueprint book that would hold multiple blueprints. This could work in one of two ways;
- An item in the inventory that you place blueprints into (a book of sorts)
- A device inserted into power armor (similar to a PDA) that allows you to 'learn' blueprints and store them 'digitally' (ie. they could be accessed from an interface)
'Refreshing' blueprints
Currently when you place a blueprint it stays for a set period of time (as indicated by the purple bar beneath the placed blueprint) but as far as I can tell there is no way to 'refresh' this time. This suggestion would involve the current force placement of blueprints (shift-click) in refreshing this time period. This would be particularly useful in networks where robots may have to travel large distances or there is a large number of objects to the placed as I sometimes find that these time-out and the robots return long distances with the items they were carrying.
That's all for now. I hope these suggestions make sense - if they need further clarification let me know. Thanks for reading

